手机版
手机版

|
管道运输作为一种高效的专用运输手段,已在石油天然气运输等领域发挥了越来越大的作用。国内大口径运输管线目前主要采用螺旋焊接钢管建造。为保证运输管线的可靠运作,必须严格保证所使用的螺旋钢管的质量。因此,需要在钢管出厂前对焊缝进行无损探伤检查,沧州欧谱以消除隐患。
在欧美发达国家,人们对钢管的无损检测认识得比较早,在检测设备的研制和使用上进行了大量的投入。同国外相比,我国的检测设备水平比较落后,对钢管焊缝的检测基本上还是采用手动或半自动设备进行,因为检测效率极低,通常只能采用抽查的方法,无法完全检测出每根钢管中可能存在的缺陷。在各种国际性招标活动中,通常都要求参与投标的钢管生产企业具有比较完善的检测措施,一些企业虽然花费巨额资金从国外引进了一些自动检测设备,但由于国内生产和检测配套条件的限制,其使用效果往往并不理想,结果导致许多引进设备处于闲置状态,浪费了大量的资金。目前的情况大大限制了国内钢管生产企业的国际竞争力。因此,钢管焊缝的无损检测一直是各企业难以解决而又亟待解决的重要问题,迫切需要开发一种适合于我国生产条件的自动化焊缝检测设备。本文将首先介绍一种用于螺旋焊接钢管焊缝检测的自动化超声波探伤系统整体组成,然后介绍作为检测设备核心的焊缝跟踪机构的机械和电气结构,并介绍了系统自动探伤的工作过程。
2.探伤系统组成
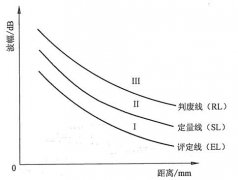
焊缝探伤比较有效的手段是采用脉冲反射式超声波检测技术。由于主要是判断是否存在缺陷,这里我们采用A型显示(A扫描)的超声波探伤仪。它利用超声波的反射特性,在荧光屏上以纵坐标代表反射回波的幅度,以横坐标代表反射回波的传播时间,根据缺陷反射波的幅度和时间来确定缺陷的大小和存在的位置,T为工件表面反射波,F为缺陷波,B为底面反射波。
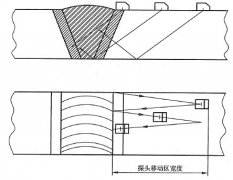
采用超声波探伤仪的自动化探伤系统组成结构,整个系统由超声波探伤仪、沧州欧谱运输小车和焊缝跟踪机构组成。超声波探伤仪用于焊缝探伤,这里采用沿圆周对称分布的6个斜探头以检测焊缝中存在的气孔、裂纹、夹渣、未焊透和未熔合等缺陷;运输小车用于移动钢管,检测时,将钢管放在运输小车上送到焊缝跟踪系统下方,小车一边前进,一边旋转钢管,两种运动合成为钢管的螺旋运动,理想情况下,钢管的进给和旋转严格同步,在钢管焊缝螺旋角不变的条件下,焊缝严格位于探伤系统的检测范围内。焊缝跟踪系统是超声探伤仪的载体,用于跟踪钢管焊缝的中心。为保证检测的精度和可靠性,超声探头系统需要安装在焊缝跟踪系统上进行工作。其原因是:(1)探伤仪的探头系统对位置精度要求较高。由于超声探头系统本身的原理和结构的限制,要求探头系统必须具有很高的定位精度。(2)焊缝条件限制。理想情况下,钢管的焊缝为一参数固定的螺旋线,但在钢管焊接过程中有时会出现偏差,造成钢管焊缝几何参数发生变化,因而要求检测设备能够补偿这一种变化。(3)由于运输小车的运动不精确,难以保证进给和旋转两种运动的严格同步,从而导致焊缝相对探头系统发生偏移,因此,要求检测设备必须能跟踪焊缝的偏移。
系统中,采用两台交流变频调速电机实现运输小车的进给和钢管的旋转,由于钢管的质量大,钢管的进给和旋转无法严格同步,在检测初始阶段尤为显著,因而焊缝跟踪系统是焊缝自动探伤设备的关键部分。下面着重介绍这一部分。
3.焊缝跟踪系统机械结构
由前述可见,自动化超声波探伤对焊缝跟踪系统的要求很高,我们所设计的焊缝跟踪系统满足下述指标要求:
1)适用钢管范围:螺旋埋弧焊管外径Φ337-Φ1200mm;带钢宽度550-1500mm;焊缝螺旋角10°-75°;焊缝余高 ≥2mm;焊缝宽度8-30mm.
2)焊缝切线运动速度:≤8m/min;
3)焊缝位置跟踪精度:±1mm;
4)水平跟踪范围:±300mm;
5)垂直跟踪范围:±150mm。
根据指标要求,在设计焊缝跟踪系统时,在机械上采用两个平移自由度:一个为垂直方向,带动超声波探头架上下移动;另一个为水平方向,带动探头架在水平面内沿钢管母线方向移动,以实现对钢管焊缝偏移的跟踪。焊缝跟踪系统机械结构如图3所示。探头架安装在垂直螺母上。两个自由度均采用丝杠副实现平移运动,各采用一台交流伺服电机通过减速器驱动。电机轴到丝杠轴的减速比为9,丝杠的螺距为6mm,电机最高转速为300r/min,由上述参数得到水平垂直机构的最大跟踪线速度为2m/min,根据实际条件下测得的焊缝偏移统计数据,此系统能够满足跟踪速度的要求。根据传动方式和系统机械结构参数,将所有转动惯量折算到电机轴上,依照公式:
W额≥(3-4)W轴
计算,取两个交流伺服电机的额定功率为200W。上式W额为电机的额定转矩,W轴为电机轴上的转矩。
4.焊缝跟踪系统电气系统结构
焊缝跟踪系统电气部分组成如图4所示,它主要由以下几部分构成。
(1)工业控制计算机。系统不仅要实现各种控制功能,还要具有良好的操作界面。这里采用一台Pentium586工业轧辊硬度计http://www.zhagunyingduji.com控制计算机作为系统主机,编制了基于Windows95的图形模式操作软件,可在显示器上实时显示焊缝外观的三维信息,并且具有设备的各种状态显示和报警提示,易于掌握和使用。
(2)数字量输入卡用于扫描操作面板上各种操作按钮的状态、伺服驱动器的状态以及各沧州欧谱个轴方向的零位和极限开关,通过ISA总线传递给工控机,以确定应该采取的操作。数字量输出卡用于控制伺服系统的上电、操作模式以及指示灯的状态。
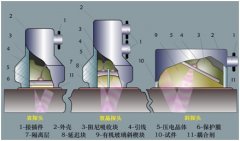
(3)焊缝位置传感器。目前的探伤跟踪系统中多采用电磁式差动传感器和摄像头作为焊缝位置检测单元。在实际应用中,由于焊接时多采用直流焊机,焊接后一般还要实行倒渣操作,导致焊缝在检测之前已被磁化,同时焊缝的形状并不完全对称,这些因素使得电磁式差动传感器的应用效果并不理想,难以实现焊缝的自动跟踪。采用摄像头作为检测单元实现自动跟踪需要进行图象处理,其运算代价较高,对控制器的运算速度具有很高的要求,在焊缝的高速检测中应用还有一段距离,目前主要用于人工操作的跟踪系统。这里我们设计了一种基于激光测距原理的扫描式焊缝位置传感器,它使用激光测距传感器作为距离敏感元件,采用一个往复扫描机构,通过扫描获取钢管焊缝的二维图象,提供给工业控制计算机提取钢管焊缝信息,用来对钢管焊缝实现自动跟踪。这种传感器具有精度高、抗干扰、数据处理简单等优点。
(4)焊缝传感器接口卡。焊缝位置传感器本身也是一个伺服系统,需要实时地对扫描机构的运行进行控制,同时还要采集扫描的位置和焊缝的高度信息,以便于工控机提取焊缝的特征。为此采用单片机作为控制核心设计了从计算机系统,通过ISA总线与工控机相连。使系统以一定的时序独立工作,实现对扫描机构的控制、焊缝位置信号的采集以及数据的预处理和传输。为了实现扫描速度曲线的优化,采用零相位跟踪方法控制扫描机构,以便获取尽可能多的有效采样数据,对获取的焊缝数据使用小波分析方法提取焊缝的位置。
(5)交流伺服电机及驱动器。考虑到设备的定位精度要求较高,采用两台交流伺服电机作为两个自由度的驱动元件。焊缝位置检测单元获取的是焊缝的水平和垂直方向的偏差量,所以伺服电机都采用位置控制方式,电机采用光电编码器作为反馈元件,位置伺服精度最高可达到5个脉冲当量,小于机械结构的间隙值,完全能够满足系统的跟踪精度要求。
(6)定时器/计数器用于对两台伺服电机的控制。其中计数器用于测量系统的当前位置,提供给工控机以实现整个系统的闭环,定时器用于向伺服电机驱动器发出指令,控制电机的转速和转角,实现位置控制。
5.自动检测过程
本文所介绍的自动超声探伤系统工作时,采用下述自动检测流程:
(1)运输小车接受钢管,移动到检测初始位置;
(2)轨道上的光电传感器检测到钢管前端后,给出"钢管准备好"信号,停止小车的进给,探头系统和焊缝位置传感器落到钢管表面,焊缝位置传感器开始扫描,旋转钢管寻找焊缝;
(3)焊缝初始定位后,启动运输小车,探伤仪启动,开始自动探伤;
(4)检测到钢管末端后,抬起探头系统,探伤仪和跟踪机构复位;
(5)运输小车将钢管运到分级拨管位置,卸下钢管,继续下一个检测周期。
在钢管的自动探伤过程中,可随时将系统切换为手动方式,此时,沧州欧谱操作人员可根据显示器上的焊缝三维综合图象进行焊缝的手动跟踪。系统采用了多级保护措施,可在紧急情况下采取相应的操作,以防止对系统造成损害。
6.结论
焊缝的自动无损检测是保证钢管质量的一种重要手段,但实现起来具有一定的困难。由于采用了合理的结构和测试技术,尤其是激光测距式焊缝位置检测单元的设计和使用,使得本文所设计的超声自动探伤仪具备了进行焊缝超声探伤所要求的跟踪速度和精度。本系统的样机已在实际生产环境中进行了实验,结果表明,系统能够满足螺旋焊接钢管焊缝检测的基本要求,说明其设计思想是正确的。由于实际应用环境比较复杂,存在各种光、电干扰以及周围环境的机械震动,目前需要在系统的抗干扰性以及检测元件的小型化方面进行进一步的工作,以使系统能够适应钢管生产过程中的复杂环境。
|